
Célula eléctrica de la batería del equipo inteligente de la asamblea que ata con correa la máquina
1. Requisitos de diseño de la célula eléctrica que atan con correa la máquina:
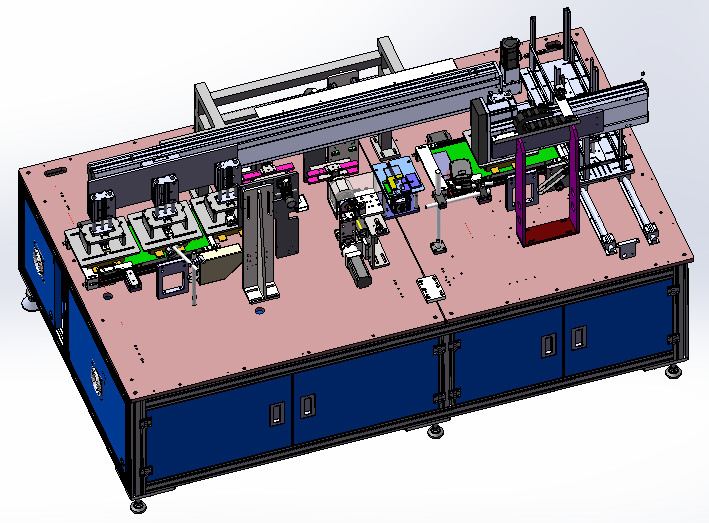
1.1. El equipo se basa en los requisitos de diseño de proceso de la batería que ata con correa la máquina, y la máquina que ata con correa automática inteligente de la batería es manufacturada basada en el diseño de la industria 4,0. La cadena de producción incluye: mecanismo de alimentación, manipulante de alimentación, apilando y colocando la estación, liando la posición, la posición de rociadura, y la línea de descarga
1.3. Condiciones del uso:
1.3.1 condiciones de la fuente de alimentación: fuente de alimentación principal: el 220V±15%
aire comprimido 1.3.2: ≥ 0.5mpa, 10L/30Min
1.3.3 temperaturas ambiente: 0℃ ~ 40℃.
humedad relativa 1.3.4: 10 ~ 60%RH
1.4. Requisitos de producción:
1.4.1 requisitos del aspecto:
aspecto del uniforme de 1.4.1.1, ninguna deformación;
1.4.1.2 ningún agujerito, marca del flujo, u otros defectos;
1.4.2 requisitos del tamaño:
1.4.2.1. Anchura 35-100m m del producto.
longitud del producto de 1.4.2.2: 50-150m m
grueso de pared del producto de 1.4.2.3: 3.8-12m m
código de barras de 1.4.3 baterías
1.4.3.1. En el frente, utilice el código impreso por laser del qr o pegue el código de barras
1.5. Requisitos de funcionamiento de la batería que ata con correa la máquina:
Los requisitos de ser encontrado bajo producción normal condicionan; El mecanismo de alimentación, colocando el mecanismo, barre el mecanismo, la operación del mecanismo obligatorio, del mecanismo del manipulante, estable y confiable, simple; Todas las piezas móviles deben tener razonable, confiable, fácil actuar el mecanismo de la lubricación.
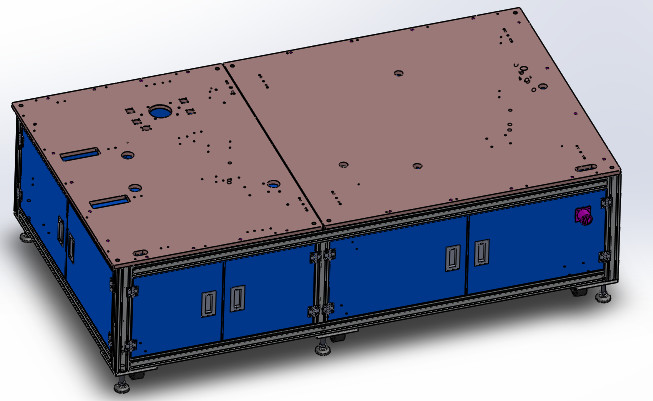
diagrama esquemático 1,5 del equipo
tamaño del empleo del equipo 1.5.1 (unidad: milímetro): 2300*1300*1500 (longitud * anchura * altura)
2. Componentes principales de la célula eléctrica que atan con correa la máquina:
2,1, el estante
2.2.1 el sistema del marco está montado con los perfiles 30X60 y las piezas de chapa de aluminio A3.
2.2. Estación del cargamento del material del plato
2.2.1 requisitos de diseño
el poder de alimentación de 2.2.1.1 es conducido por el cilindro y dos cajas de alimentación. Está colocando el bafle en los lados izquierdos y derechos, mecanismo de elevación,
Un lado se equipa del interruptor fotoeléctrico de la detección
parámetros de proceso de 2.2.1.2: la anchura de colocación se puede ajustar según el tamaño de la batería. El nivel de alimentación manual es cerca de tres estaciones, y el manipulante intermedio toma el nivel de alimentación
configuración de equipo de 2.2.2 tuberías
| El número de serie | Composición del sistema | La configuración de sistema | El número de |
| 1 | Sistema de transferencia | cilindro | 1 |
| Curso resbaladizo | 2 | ||
| 2 |
Sistema de colocación (GPS)
|
Bloque de colocación del artículo | 4 |
|
Parte trabajada a máquina
|
1 | ||
| compartimiento | 2 | ||
| Plataforma de la cosecha | 1 | ||
| 3 | 升 el sistema del elevador | Motor de elevación | 1 |
| Sistema del tornillo de elevación | 1 |
función 2.2.3: ponga manualmente la batería de la pila del conjunto de materiales del disco en la caja material, el interruptor fotoeléctrico de la detección detecta que el cilindro del material está transferido al lugar medio y espera al manipulante de alimentación para coger el material, y las dos cajas de alimentación circulan la alimentación
manipulante de alimentación de 2,3 baterías
2.3.2. Piezas principales de equipo
2.3.2.1. Mano de alimentación de la batería: se compone del servomotor, del módulo del tornillo de posicionamiento, del cilindro del interruptor de proximidad, de la elevación, del grupo de la placa de la succión, del etc. La estructura es simple y práctica.
2.3.2.1 .1: el movimiento del grupo del lechón es controlado por el motor servo del módulo del tornillo para la colocación exacta. Batería del interruptor de proximidad disponible.
2.3.2.1 .2: el objeto es conveniente, continuo, estable y confiable.
función 2,4: dibuje la batería en la bandeja al mecanismo de la transferencia de la batería y la bandeja vacía al mecanismo vacío de la colección de la bandeja
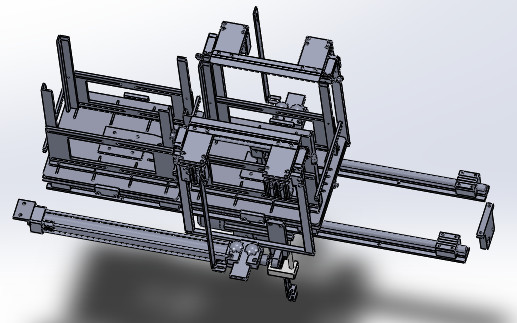
mecanismo de la transferencia de 2,4 baterías
24.1.1. Mecanismo de transmisión de la batería: este mecanismo se compone principalmente del motor de escalonamiento, de la correa, del soporte, colocando el cilindro, el interruptor de proximidad, el etc.
mecanismo del poder de 2.4.2.1: velocidad ajustable.
2.4.2.2. La batería se asegura sin daño a la batería con la colocación de los útiles
la posición de 2.4.2.3 de colocar los útiles y la batería se puede ajustar fácilmente, con la colocación del ≤± 0.1m m de la exactitud
mecanismo tensor de la correa de la correa de 2.4.2.4
2.4.2.5 basa, el mecanismo se compone principalmente del embase y la colocación del perno, colocando el perno que coloca, asegura la estabilidad y la confiabilidad, operación simple.
función 2.4.3: transfiera la batería del manipulante de alimentación a la posición y espere al manipulante de medición de la resistencia del voltaje para coger el material
2.5.1.1. Mecanismo de la exploración: este mecanismo se compone principalmente del arma del soporte, de la exploración, del etc.
el ángulo de la altura del soporte de 2.5.2.1 se puede ajustar arbitrariamente
función 2.5.3: explore el código del qr en la superficie de la batería para recoger los datos originales de la batería y para transmitirlos al sistema informático.
2.6.1.1 el dispositivo se compone principalmente del soporte, cilindro de elevación, punta de prueba fotoeléctrica del sensor, bloquea y así sucesivamente.
2.6.2.1 el soporte se puede ajustar arbitrariamente según el tamaño de la batería
función 2.6.3: apile y coloque la célula.
2.7.1.1. Mecanismo de la rotación: este mecanismo se compone principalmente del motor de escalonamiento, de la correa, del soporte, colocando el cilindro, el interruptor de proximidad, el etc.
cinta de 2.7.2.1 que pone el mecanismo: velocidad ajustable,
2.7.2.2. La batería se asegura sin daño a la batería con la colocación de los útiles
2.7.2.3. La colocación de los útiles y de la batería se puede ajustar convenientemente, con la colocación del ≤± 0.1m m de la exactitud
mecanismo tensor de la correa de la correa de 2.7.2.4
2.7.2.5 basa, el mecanismo se compone principalmente del embase y la colocación del perno, colocando el perno que coloca, asegura la estabilidad y la confiabilidad, operación simple.
función 2.7.3: grabe juntas las células eléctricas tomadas del manipulante horizontal
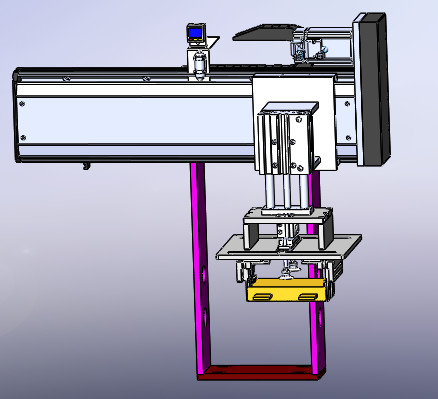
manipulante de alimentación de 2.8.1.1: este mecanismo se compone principalmente del soporte, del cilindro de elevación, del módulo de la barra del tornillo, del disco de la succión, de la barra de regulación, del etc.
2.8.2.1 el soporte se puede ajustar arbitrariamente según el tamaño de la batería
función 2.8.3: lleve la batería del mecanismo de la transferencia de la célula el montaje de colocación de la plantilla que ata con correa
2.9.1.1. Cifre el mecanismo de la exploración: este mecanismo se compone principalmente del soporte, del arma del código, del etc.
el ángulo de la altura del soporte de 2.9.2.1 se puede ajustar arbitrariamente
función 2.9.3: según los tipos de la batería clasificados por el sistema del análisis de datos del sistema informático, diversos códigos se rocían en la superficie de la batería.
2.10.1.1. Mecanismo de transmisión de la batería: este mecanismo se compone principalmente del motor de escalonamiento, de la correa, del soporte, colocando el cilindro, el interruptor de proximidad, el etc.
mecanismo del poder de 2.10.2.1: velocidad ajustable,
2.10.2.2. No se garantiza ningún daño a la batería con la colocación de los útiles
2.10.2.3. La colocación de las herramientas y de las baterías se puede ajustar fácilmente, con la colocación del ≤± 0.1m m de la exactitud
mecanismo tensor de la correa de la correa de 2.10.2.4
2.10.2.5 basa, el mecanismo se compone principalmente del embase y la colocación del perno, colocando el perno que coloca, asegura la estabilidad y la confiabilidad, operación simple.
función 2.10.3: la batería tomada del manipulante horizontal está esperando el código que se rociará y entregado al nivel material del robot
1. Nueva promesa del equipo
Nuestra compañía garantiza que las mercancías proporcionadas a los clientes son equipo a estrenar, completo e inusitado.
2. Compromiso de la confidencialidad
Nuestra compañía promete que sin el permiso escrito de ningún partido, de los dibujos relacionados del otro partido, de la información técnica, de los secretos comerciales de la información del negocio y de otro sector y de los secretos técnicos no debe ser escapado a los terceros de ninguna manera.
3. Compromiso del servicio post-venta
(1) dos meses a partir de la fecha del envío del equipo, el partido B es responsable de faltas no humanas en una garantía oportuna y libre en el plazo de un año (cuando el equipo es culpable, el personal de servicio post-venta responderá en el plazo de 2 horas después de recibir la notificación. Según la situación, los personales deben existir en el plazo de 48 horas. No más adelante de 60 horas, asegurar la continuidad de la producción del comprador;
(2) después del equipo ha pasado el período de garantía, si hay un problema, los dos partidos comunican y se ocupan de él. En caso de necesidad, enviarán los personales de las después-ventas para repararlo, y solamente el coste será cargado. Zh
(3) durante el período de garantía estipulado en el contrato y el acuerdo técnico firmados por los dos partidos, la compañía proporcionará una garantía para los problemas de la calidad que no son causados por daño humano durante el uso normal de nuestros productos.













